HUMERO – innowacyjny projekt wykonany przez studentów WMT

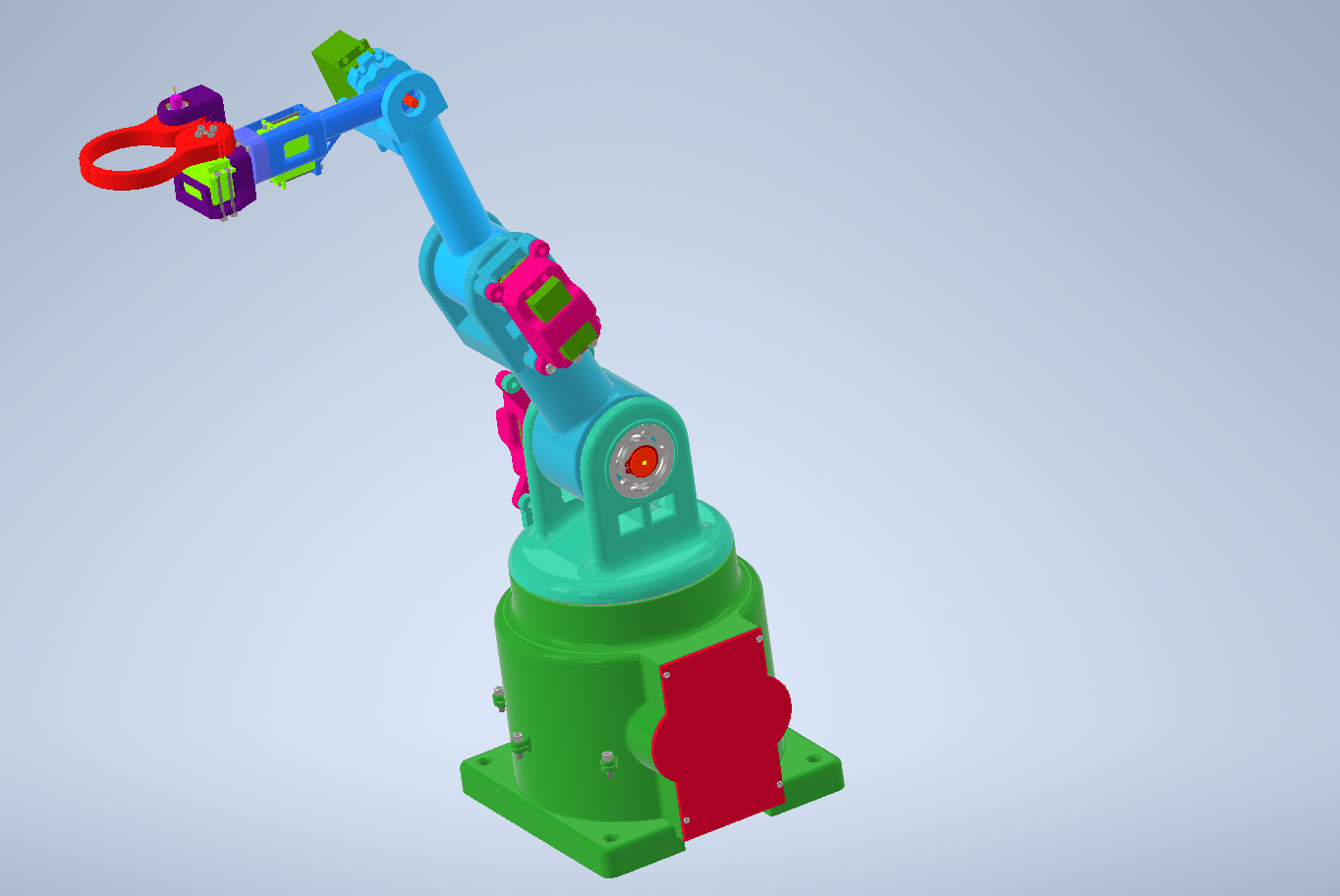
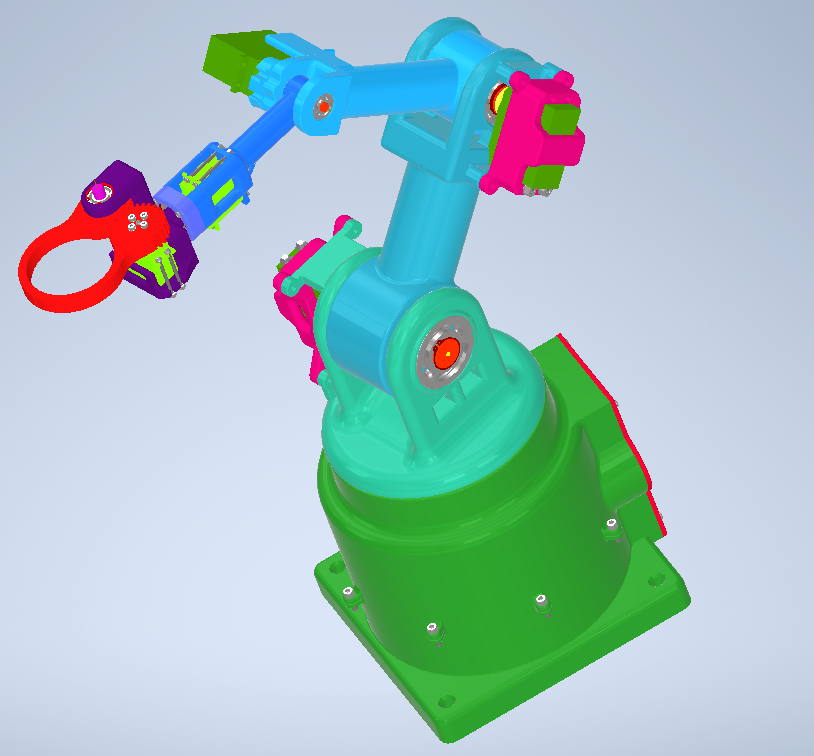
Łukasz Kapała i Aleksander Janeczko, studenci Wydziału Mechaniczno-Technologicznego w Stalowej Woli w ramach działalności w Kole Naukowym Informatyki Przemysłowej zaprojektowali oraz wykonali prototypowe ramię robota przemysłowego przez zastosowanie procesu drukowania przestrzennego 3D. Opiekunem koła jest prodziekan ds. kształcenia WMT dr Andrzej Chmielowiec.
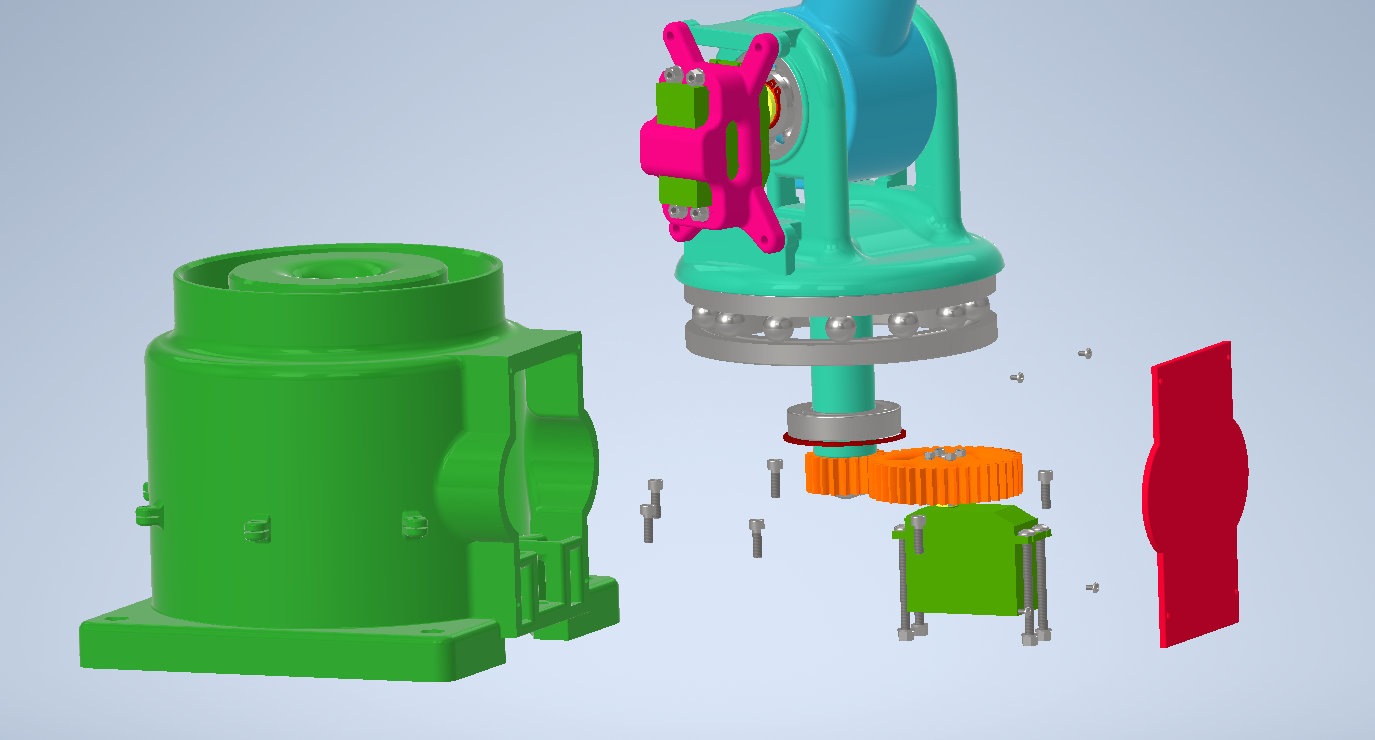
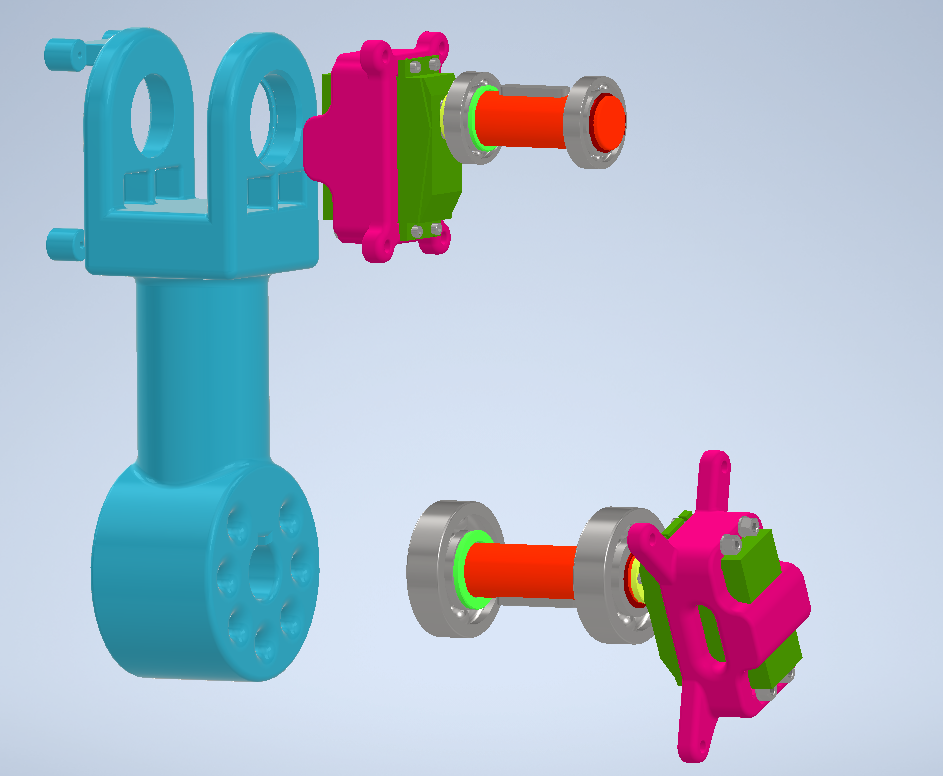
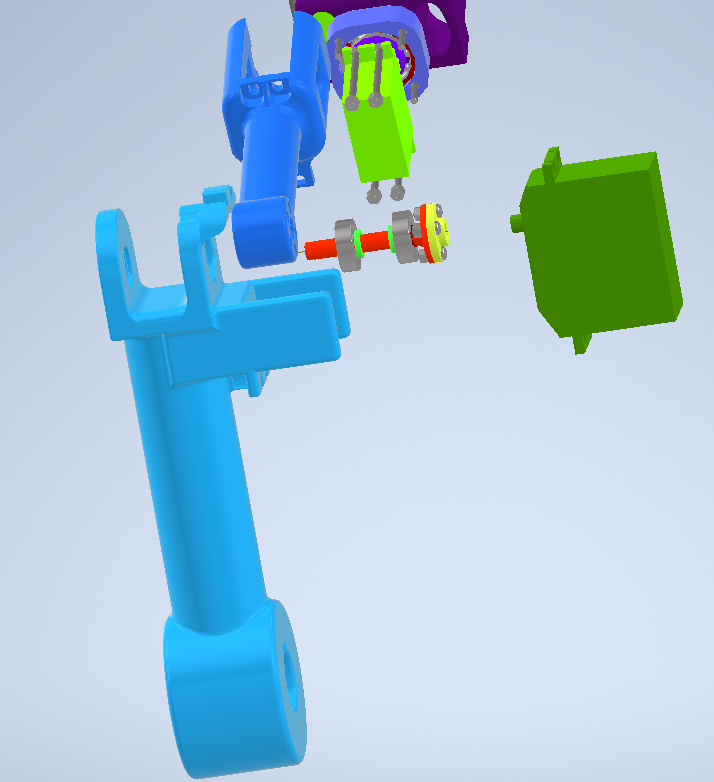
Projekt HUMERO był realizowany na Wydziale Mechaniczno-Technologicznym w Stalowej Woli w kilku etapach. Były to: projekt CAD robota i dobór elementów mechanicznych, takich jak łożyska, przekładnie i serwonapędy, projekt i wykonanie układu zasilającego, oprogramowanie sterujące pracą mechanizmów, oprogramowanie służące do wygodnego programowania robota przy użyciu panelu dotykowego i interfejsu graficznego.
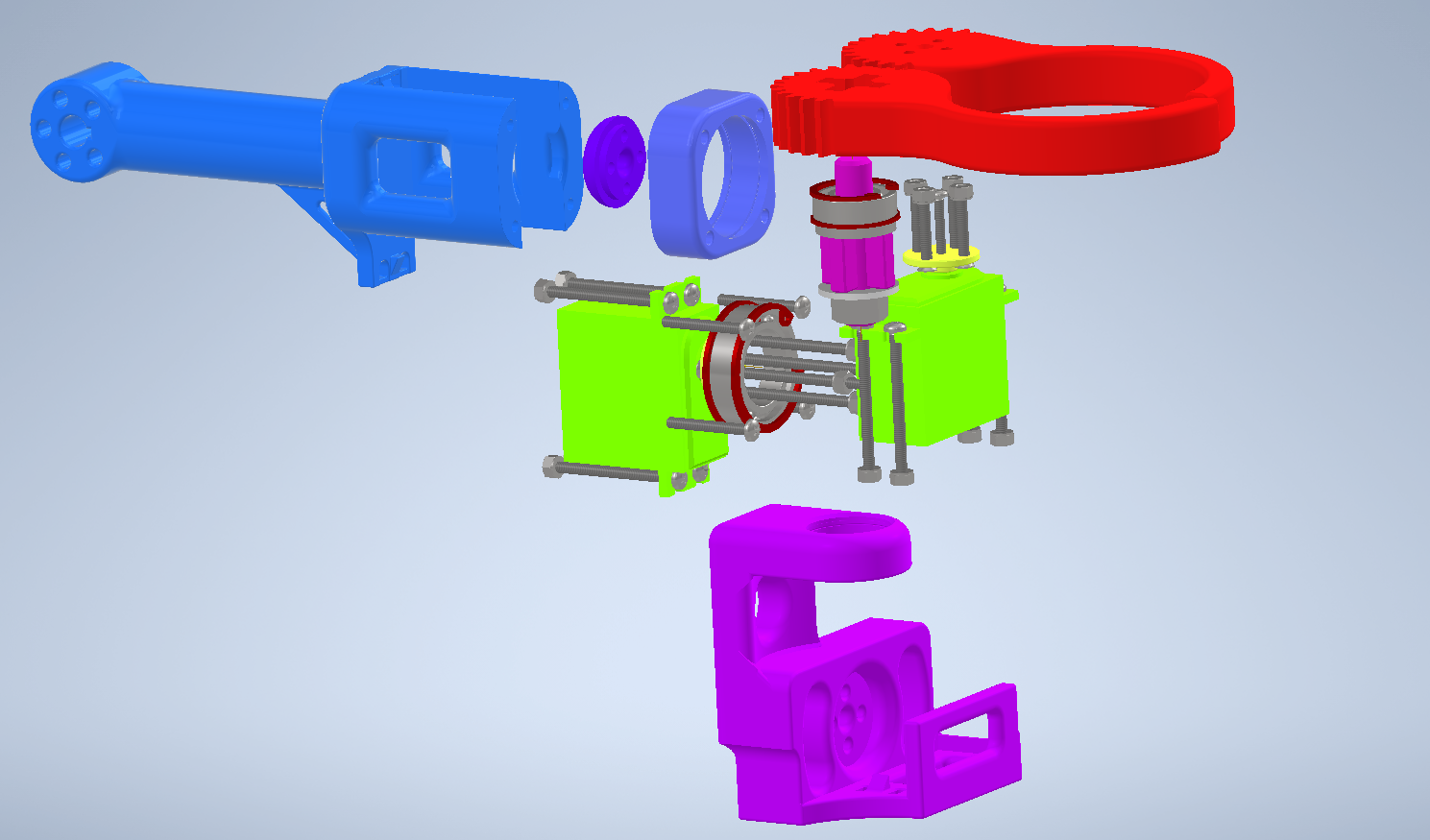
Wydruk wszystkich elementów trwał ponad miesiąc. W procesie druku elementów projektu uczestniczyło wielu studentów, którzy nadzorowali ten proces. Po rozwiązaniu problemów technicznych udało się wydrukować wszystkie elementy składowe i połączyć je w całość razem z elementami mechanicznymi i elektrycznymi. Następnie przygotowana została skrzynka sterująca, która zawiera elementy zasilające oraz mikrokontroler ATMega256 z opracowanym oprogramowaniem kontrolującym pracę serwomechanizmów. Do kontrolera ATMega256 podłączono mikrokomputer Raspberry Pi z wyświetlaczem dotykowym i aplikacją umożliwiającą łatwe i intuicyjne pisanie prostych programów na stworzonego robota.
„Ramię robota posiada sześć ruchomych osi z możliwością niezależnego ich kontrolowania przez sprzężenie układu sterowania z funkcjonalnym interfejsem użytkownika. Głównym urządzeniem napędzającym robota są serwomechanizmy, czyli zamknięte układy sterowania zawierające małe silniki elektryczne połączone z przekładnią zębatą. Z poziomu rozbudowanego panelu sterowania oraz wykorzystania m.in. platformy minikomputera Raspberry Pi oraz modułu Arduino operator ramienia jest w stanie zaprogramować określone operacje, które następnie wykonuje robot” – mówi student Aleksander Janeczko.
„W moim przekonaniu realizacja tego rodzaju projektów to świetna przygoda i okazja do osobistego rozwoju. Dotyczy to zwłaszcza zadań, do których realizacji potrzebna jest rozległa wiedza nie tylko z jednej dziedziny. Miło jest obserwować, jak studenci z głowami pełnymi pomysłów biorą się za rozwiązywanie problemów znacznie wykraczających poza program studiów” – dodaje dr Andrzej Chmielowiec.